隨著智能制造和工業(yè)自動化水平的不斷提升,電子零件裝配與生產環(huán)節(jié)對精度、效率和靈活性的要求日益嚴苛。常州作為長三角重要的制造業(yè)基地,眾多電子企業(yè)正積極尋求技術升級,以應對小批量、多品種、高精度的生產挑戰(zhàn)。在此背景下,視覺引導抓取(Vision-Guided Pick-and-Place)方案應運而生,并朝著定制化、實時反饋與全境到達的技術深度融合發(fā)展。
一、方案核心:視覺引導抓取技術
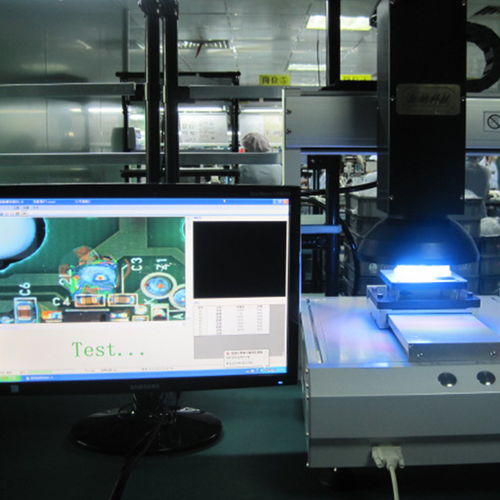
視覺引導抓取系統(tǒng)主要由工業(yè)相機、光學鏡頭、光源、圖像處理軟件以及機器人(或執(zhí)行機構)組成。其工作原理是:通過工業(yè)相機拍攝電子零件的圖像,經圖像處理軟件進行定位、識別、測量和檢測,計算出零件在空間中的精確位置與姿態(tài),進而引導機器人末端執(zhí)行器(如吸盤、夾爪)完成精準抓取和放置。
對于常州地區(qū)電子產業(yè)而言,該方案能有效解決以下痛點:
- 零件微小、形態(tài)多樣:如芯片、電容、連接器等,傳統(tǒng)機械定位難以適應。
- 來料位置不一致:料盤、傳送帶或散堆來料,需系統(tǒng)自主識別定位。
- 高精度裝配需求:PCB板貼裝、精密組裝等場景對亞毫米級精度有嚴格要求。
- 生產線柔性化:快速換線,適應不同產品的生產,減少工裝夾具成本。
二、定制化開發(fā):貼合本地產業(yè)需求
“定制化”是方案成功落地的關鍵。常州電子企業(yè)涉及消費電子、汽車電子、通訊設備等多個領域,零件材質(反光、吸光)、尺寸、來料方式、節(jié)拍要求各不相同。因此,方案開發(fā)需深入現(xiàn)場調研,進行針對性設計:
- 視覺系統(tǒng)選型定制:根據零件尺寸和精度要求,選擇合適分辨率、幀率的相機(如CMOS或CCD),搭配特定波段的光源(如環(huán)形光、同軸光、背光)以凸顯特征。
- 算法與軟件定制:開發(fā)或優(yōu)化圖像處理算法,應對常州企業(yè)常見的特定零件識別難題(如引腳檢測、極性判斷、缺陷初篩)。軟件界面通常支持本地化操作,便于技術人員調試。
- 機器人與末端工具集成:根據抓取對象的重量、形狀和易損性,選配六軸機器人、SCARA機器人或定制桁架機械手,并設計專用吸嘴或夾爪。
三、技術升華:實時反饋與全境到達
為使系統(tǒng)從“能工作”邁向“高效、可靠、智能”,兩項前沿技術被深度整合:
1. 實時反饋系統(tǒng)
傳統(tǒng)視覺引導為“開環(huán)”過程,即拍照-計算-執(zhí)行。引入實時反饋后,系統(tǒng)形成“感知-決策-執(zhí)行-驗證”的閉環(huán):
- 過程監(jiān)控:在抓取或放置動作完成后,可立即通過視覺進行二次定位校驗,確認位置是否正確,精度是否達標。
- 數(shù)據追溯與自適應:系統(tǒng)持續(xù)記錄每次抓取的成功率、位置偏差等數(shù)據。當出現(xiàn)連續(xù)偏差或趨勢性變化時,可自動微調機器人坐標或觸發(fā)報警,甚至能通過機器學習算法優(yōu)化抓取參數(shù),適應環(huán)境的緩慢變化(如熱變形、機械磨損)。
- 質量攔截:在抓取前或抓取過程中,實時反饋可集成缺陷檢測功能,及時發(fā)現(xiàn)零件瑕疵并分類剔除,避免流入后道工序。
2. 全境到達技術
“全境到達”指的是機器人工作空間內,無論零件位于何處(工作臺、移動料車、不同高度的料架),系統(tǒng)都能通過視覺引導機器人精準到達并完成任務。這突破了傳統(tǒng)固定工位的限制,實現(xiàn)了更大范圍的柔性化作業(yè)。其技術關鍵包括:
- 大視野視覺與手眼標定:采用高分辨率相機或相機組合,覆蓋廣闊的工作區(qū)域。精確的手眼標定(Eye-in-Hand或Eye-to-Hand)確保視覺坐標系與機器人坐標系無縫轉換。
- 3D視覺與深度感知:對于堆疊、散亂的零件,采用3D視覺(如結構光、雙目視覺)獲取深度信息,引導機器人進行三維空間的避障和抓取。
- 動態(tài)目標跟蹤:若零件處于傳送帶等運動狀態(tài),系統(tǒng)需具備動態(tài)跟蹤和預測能力,實現(xiàn)“飛拍”與抓取。
- 多任務路徑規(guī)劃:系統(tǒng)能夠智能規(guī)劃機器人的移動路徑,在多個抓取點、放置點之間選擇最優(yōu)順序,避免碰撞,縮短節(jié)拍。
四、方案價值與未來展望
為常州電子企業(yè)定制開發(fā)的、集成實時反饋與全境到達技術的視覺引導抓取方案,能夠顯著提升生產線的自動化水平、產品一致性與整體效率,降低對熟練工人的依賴和操作成本。
隨著5G、邊緣計算和AI技術的進一步滲透,該方案將朝著以下方向發(fā)展:
- 更強的AI識別能力:通過深度學習,輕松應對更復雜、更微小的新零件,無需繁瑣的算法重寫。
- 云平臺與數(shù)字孿生:系統(tǒng)數(shù)據上傳至云端進行分析,通過數(shù)字孿生模型進行仿真優(yōu)化和預測性維護。
- 更緊密的廠內物流協(xié)同:視覺引導抓取系統(tǒng)與AGV、立體倉庫無縫對接,實現(xiàn)從倉儲到裝配的全流程智能物流。
常州電子零件視覺引導抓取方案的定制化開發(fā),特別是與實時反饋和全境到達技術的深度融合,不僅是解決當前生產痛點的利器,更是企業(yè)邁向工業(yè)4.0、打造智能工廠的重要基石。本地技術服務商與制造企業(yè)需緊密合作,持續(xù)迭代,方能在這輪技術變革中占據先機。